A professor and lecturer in the Mechanical Engineering Department are on a yearslong mission to build a four-legged robot – a project that is teaching students to embrace challenges and celebrate milestones.
Professor Siyuan (Simon) Xing and lecturer Charlie Refvem teamed up in 2020 as both were excited by the idea of designing a robotic quadruped with a dynamic gait.
Most quadrupedal robots move forward and backward at low speeds, but Xing and Refvem wanted to create a machine that could run, walk and jump at different speeds.
They haven’t yet decided what type of creature the robot will be, but a dog and mustang are in the running. There is much to complete before aesthetic decisions are made, but Refvem and Xing are in no rush; they recognize the benefits that come with a long-term project.
“Students have to develop resilience and adapt, because there are 100,000 things that can go wrong with a project like this,” Refvem said. “We’re asking students to do abstract things, but their solutions have surprised and amazed me.”
During the 2021-22 school year, the team hit a major milestone when their robot hopped on its four legs for the first time. Last year, Refvem and Xing took their robot to the next level with the help of a treadmill and a group of adaptable, tenacious students.
Getting a Leg Up
The project kicked off during a past Summer Undergraduate Research Program, when two students began working on a single leg of the robot to gain control of the limb.
The Mechanical Engineering Industrial Advisory Board supplied funding for the project that was slowed in the beginning by COVID-19 and an inability to order parts during the pandemic.
When classes moved to a virtual format, Refvem and Xing shifted gears, directing their first group of mechanical engineering undergraduate and graduate students as they completed simulation-based projects through much of 2021.
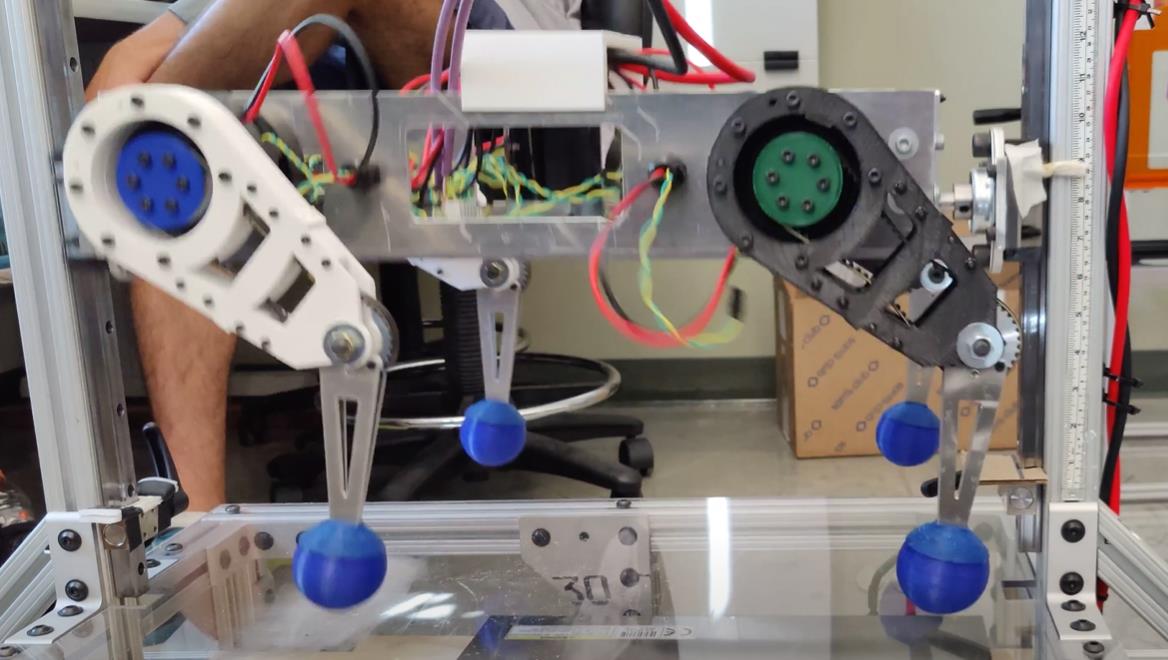
Once back on campus, students began developing the first prototype – a robot with four operational legs – they planned to show off at the department’s Senior Project Expo in spring 2022.
“We weren’t sure if we’d be ready, and it came down to the last minute,” Refvem said. “It took us 46 hours out of 48 to get it working.”
The robot’s four legs ended up functioning beautifully – bending, extending and even hopping – for the expo demonstration.
They hope to one day create a robotic quadruped with the capability to traverse irregular terrain inaccessible to other robots, making it the perfect candidate for search and rescue missions, agricultural tasks like monitoring harvests or even a trip to the rocky surface of Mars.
“The main purpose is a research and teaching tool,” said Xing of the project he expects will run five more years.
Treading Lightly
The next phase will involve testing so Refvem and Xing can develop the quadruped’s dynamic gait – an agile way of walking or moving that accommodates different surfaces, inclines and obstacles while maintaining stability and fluidity.
Controlling the gait requires a platform for testing, which is where the 2022-23 project came in.
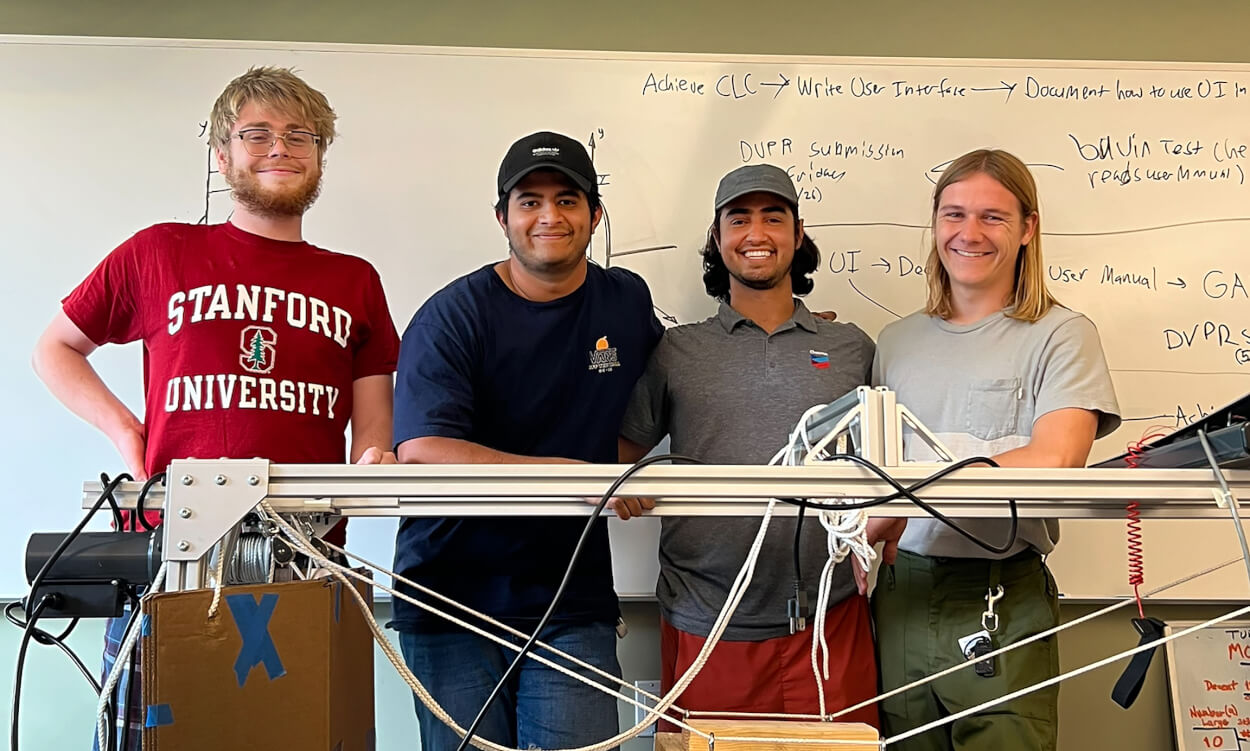
A group of senior mechanical engineering majors spent the year modifying a treadmill for the robot that includes a restraint system with winch and pulleys, allowing the team to quickly lift the robot off the deck if it maneuvers into a risky or unstable position.
Phillip Shafik, Jack Butler, Tarun Sreesaila Ganamur and Baxter Bartlett gathered in the lab before the end of spring quarter to put the finishing touches on the treadmill they found on Craigslist. The former owner sold it to the seniors at a discount and in turn, the group invited him to the Senior Project Expo in June.
Bartlett said some students wondered why they were building one treadmill from another, but he said those with a mechatronics background appreciated the complexity of the modifications that enabled the team to control the treadmill with a laptop.
Sreesaila Ganamur learned better time management and communication, which he will use beyond college, while Butler said he changed his approach to projects.
“This was the first time doing a project beyond my own wallet,” Butler said with a laugh. “My goal this time was to figure out how to do something right, not how to do something cheaply.”
Shafik didn’t have much shop experience but learned to use tools such as the band saw and waterjet. “The main takeaway, though, was the friendships that grew over the course of the project,” he said as his teammates agreed.
Work will continue this year, with treadmill testing, more mechanical design, development of software and controls, as Refvem and Xing lead the way.
“The students are learning a lot, but it’s also been a big learning process for me,” Xing said.
By Emily Slater